
Harnessing Machine Learning for Next-Generation Intelligent Transportation Systems
When? Thursday, Nov-7. 16:00 – 17:00
Where? Sala da Congregação FEEC (School of Electrical and Computer Engineering), UNICAMP, Av. Albert Einstein 400, Campinas, SP, Brazil.
LIVE Streaming: https://youtu.be/hkkRZrfE-zU [Slides]
Speaker: Visiting Postdoc Researcher Dr. Tingting Yuan

Tingting Yuan received her Ph.D. degree from Beijing University of Posts and Telecommunications (BUPT), Beijing, China, in 2018. In 2018, she joined INRIA, Sophia Antipolis, France, as a postdoc researcher. Her current interest interests are about computer network and next-generation networks, including the software defined networking, machine learning, vehicular ad-hoc networks, and so on.
Abstract: Intelligent Transportation Systems, or ITS for short, includes a variety of services and applications such as road traffic management, traveler information systems, public transit system management, and autonomous vehicles, to name a few. It is expected that ITS will be an integral part of urban planning and future cities as it will contribute to improved road and traffic safety, transportation and transit efficiency, as well as to increased energy efficiency and reduced environmental pollution. On the other hand, ITS poses a variety of challenges due to its scalability and diverse quality-of-service needs, as well as the massive amounts of data it will generate. In this talk, we explore the use of Machine Learning (ML), which has recently gained significant traction, to enable ITS. We present a comprehensive survey of the current state-of-the-art of how ML technology has been applied to a broad range of ITS applications and services, such as cooperative driving and road hazard warning, and identify future directions for how ITS can use and benefit from ML technology.
Source: Tingting Yuan, Wilson Borba da Rocha Neto, Christian Rothenberg, Katia Obraczka, Chadi Barakat, et al.. Harnessing Machine Learning for Next-Generation Intelligent Transportation Systems: A Survey. 2019. Available online: https://hal.inria.fr/hal-02284820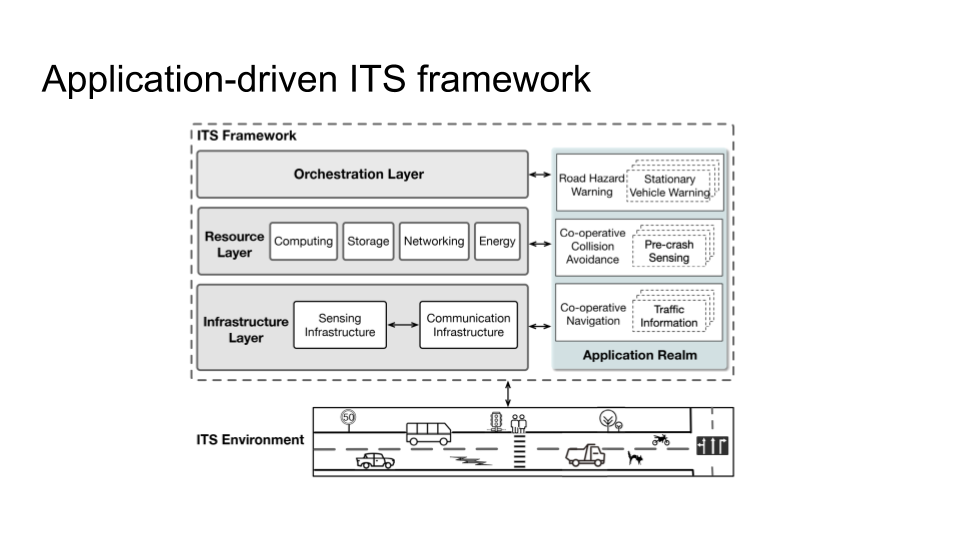
About FAPESP-INRIA-CNRS funded project DrIVE : Distributed Intelligent Vehicular Environment – Enabling ITS through programmable networks
FAPESP Grant number 2017/50361-0 (CNRS/FAPESP, http://www.fapesp.br/11608)
Project Website: https://team.inria.fr/diana/drive-associated-team/
Transportation systems are a key component of our society’s critical infrastructure and are expected to experience transformative changes during the current “information age”. A noteworthy example is the automotive industry which has been disrupted by technologies such as vehicle-to-infrastructure (V2I) and vehicle-to-vehicle (V2V) communication. Vehicular communication is expected to be one of the key technological enablers of next-generation transportation systems, also known as Intelligent Transport Systems (ITS). In ITS, vehicles exchange information to self-drive, coordinate road traffic, communicate road conditions, avoid accidents, as well as support infotainment services.
ITS services and applications pose significant challenges due to their stringent low latency, reliability, scalability, and geographic decentralization requirements. Leveraging the emergence of the Software-Defined Networking (SDN) paradigm, Software-Defined Vehicular Ad hoc NETwork (SD-VANET) architectures have been proposed as a way to address such requirements. SD-VANETs rely on the separation between network control and data planes, resulting in increased network programmability that enables vehicles to react and adjust to dynamically changing environmental- and networking conditions. They have demonstrated the benefits of using SDN’s decoupling of network control from data forwarding when compared to traditional” VANET architectures (e.g., employing multi-hop ad hoc network routing. However, SD-VANETs and other existing solutions either: (1) rely on logically centralized control plane, or (2) use a static control distribution approach, both of which are not compatible with ITS’ QoS needs.
We contend that ITS’ stringent scalability, latency, reliability, and decentralization requirements call for a distributed and flexible network control plane, decoupled from the data plane, that can automatically and dynamically adjust to current environment and network conditions. As such, the main objectives of the DrIVE associated team are to:
- Develop a programmable network control plane that will dynamically adjust to current environment conditions and network characteristics to support ITS’ scalability, quality of service (QoS), and decentralization requirements, and
- Apply the proposed distributed network control plane framework to ITS services and applications, such as road hazard warning, autonomous- and self-driving vehicles, and passenger-centric services (e.g., infotainment and video streaming).



